At its core, NUMO solves the incompressible Navier-Stokes momentum equation,
![]()
with a continuity equation in a form of divergence free velocity condition:
![]()
where u is the 3D velocity vector, p is the pressure and ν is the viscosity coefficient. We do not make assumptions about hydrostatic balance; therefore we use a full 3D pressure gradient term.
The forcing term G includes contributions from Coriolis and buoyancy forces. Buoyancy term is derived using Boussinesq approximation and reflects the impact of density variation on the solution:
The density variation is obtained from an equation of state, which accounts for temperature T and salinity S. Both quantities are transported using advection-diffusion equation.
To solve INSE we use the classical fractional step method by Karniadakis et al. [1] with stiffly-stable time integration scheme. This projection method was shown by Guermond and Shen [2] to avoid problems with the inf-sup condition, and so is an excellent choice for high-order CG/DG discretizations. The procedure consists of three steps:
1. Evaluate the non-linear term
In the first step the non-linear and forcing terms are evaluated explicitly to find a velocity prediction ^u:![]() where u^n is the velocity vector at time n, J_i and J_e define the order of the implicit and explicit time integration step respectively, α_q and β_q are the parameters of the stiffly-stable scheme, N is the non-linear term, G is the source term, and dt is the time step size. Typically we use J_e = J_i = 2, and the parameters of the stiffly-stable scheme can be found in [1].
where u^n is the velocity vector at time n, J_i and J_e define the order of the implicit and explicit time integration step respectively, α_q and β_q are the parameters of the stiffly-stable scheme, N is the non-linear term, G is the source term, and dt is the time step size. Typically we use J_e = J_i = 2, and the parameters of the stiffly-stable scheme can be found in [1].
2. Find pressure which projects velocity prediction to divergence-free space
We want to project ^u to a divergence-free velocity ^^u by using the pressure gradient:
![]() To find the pressure gradient which will impose the divergence-free condition (which is equivalent to mass conservation, see Equation set above) we take the divergence of the above equation and get the following:
To find the pressure gradient which will impose the divergence-free condition (which is equivalent to mass conservation, see Equation set above) we take the divergence of the above equation and get the following:
![]() Solving this Poisson equation for pressure requires an appropriate high-order boundary condition, which we take after [1]:
Solving this Poisson equation for pressure requires an appropriate high-order boundary condition, which we take after [1]:
![]() Using the pressure boundary condition in this form is crucial for ensuring high-order properties of this fractional step formulation, including the lifting of the inf-sup condition. Since we only need the pressure gradient, not the actual value of pressure, we can freely choose the reference pressure and impose Dirichlet BCs at one point in the domain to ensure the well-posedness of this problem. Solving the Poisson equation for pressure is the most computationally expensive step of the entire solution procedure.
Using the pressure boundary condition in this form is crucial for ensuring high-order properties of this fractional step formulation, including the lifting of the inf-sup condition. Since we only need the pressure gradient, not the actual value of pressure, we can freely choose the reference pressure and impose Dirichlet BCs at one point in the domain to ensure the well-posedness of this problem. Solving the Poisson equation for pressure is the most computationally expensive step of the entire solution procedure.
3. Solve for velocity
Finally, we can find the actual velocity by solving the following Helmholtz problem:
![]() where γ is another stiffly-stable scheme parameter. The boundary conditions for the Helmholtz problem are the physical boundary conditions of the problem.
where γ is another stiffly-stable scheme parameter. The boundary conditions for the Helmholtz problem are the physical boundary conditions of the problem.
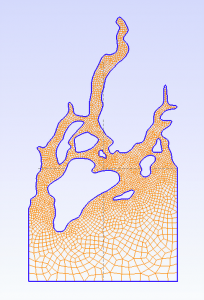 NUMO has a very limited capability to generate its meshes for the flows in simple cube-like geometries. For more complicated domains we rely on Gmsh, which is a three-dimensional finite-element grid generator able to generate quadrilateral and hexahedral meshes. NUMO is capable of reading in a grid in Abaqus format, so can be used with any software.
NUMO has a very limited capability to generate its meshes for the flows in simple cube-like geometries. For more complicated domains we rely on Gmsh, which is a three-dimensional finite-element grid generator able to generate quadrilateral and hexahedral meshes. NUMO is capable of reading in a grid in Abaqus format, so can be used with any software.
After reading in a mesh composed of linear hexahedrons, NUMO uses the p4est library to subdivide elements to the desired resolution and distribute the mesh among parallel processes. It is important to create the smallest possible mesh that represents the details of the domain, and let p4est refine it, as this is done very efficiently in parallel. Once the element mesh is generated and partitioned, NUMO creates the nodal points within the elements.